The function initializes the humanoid robot object in Python and maps the 6 servos to the specified pins.
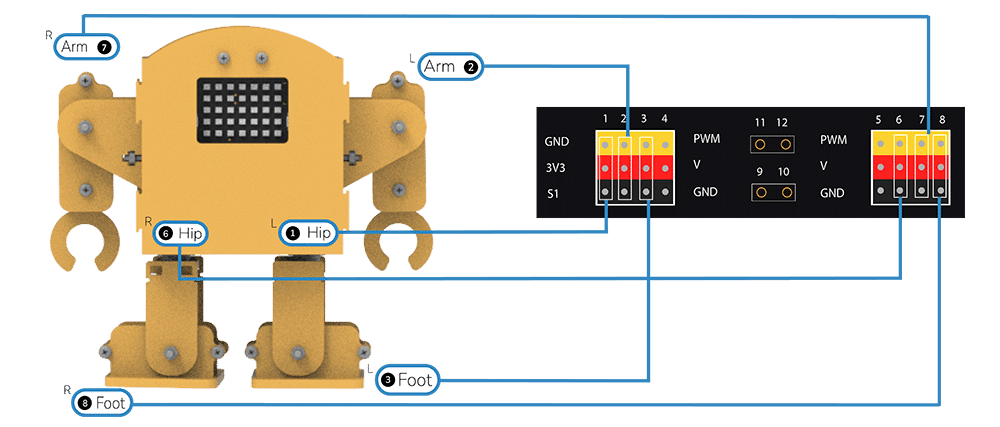
Function Definition: Humanoid(Right Hip = 7, Left Hip = 2, Right Foot = 6, Left Foot = 3, Right Hand = 8, Left Hand = 1)
| Name | Type | Description | Expected Values | Default Value |
|---|---|---|---|---|
| Right Hip | int | The servo port at which the Right Hip Servo Motor is connected. | 1-8 | 7 |
| Left Hip | int | The servo port at which the Left Hip Servo Motor is connected. | 1-8 | 2 |
| Right Foot | int | The servo port at which the Right Foot Servo Motor is connected. | 1-8 | 6 |
| Left Foot | int | The servo port at which the Left Foot Servo Motor is connected. | 1-8 | 3 |
| Right Hand | int | The servo port at which the Right Hand Servo Motor is connected. | 1-8 | 8 |
| Left Hand | int | The servo port at which the Left Hand Servo Motor is connected. | 1-8 | 1 |
The function initializes the humanoid robot object in Python and maps the 6 servos to the specified pins.


Now we will connect the Ultrasonic Sensor to the Robot. The sensor and the robot have the following pins:
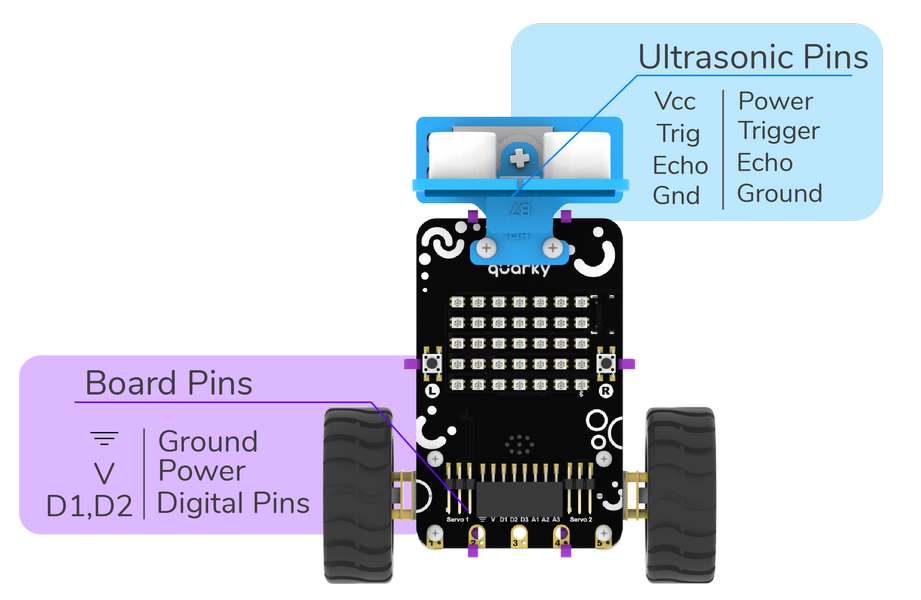
We will start with connecting the ultrasonic sensor with Quarky using the 4 set wire provided in the kit. But, first, make the connection in the following way:


sprite = Sprite('Tobi')
quarky=Quarky()
while True:
if quarky.readpushbutton("L"):
sprite.move(-10)
elif quarky.readpushbutton("R"):
sprite.move(10)
sprite = Sprite('Tobi')
quarky = Quarky()
while True:
if quarky.ispadtouched("T1"):
quarky.drawpattern("bbbjjbjjbjjbbjjbjjjbjjbjjjbjjbjjbbb")
quarky.playtone("C4", 8)
if quarky.ispadtouched("T2"):
quarky.drawpattern("cccjcccjcjjjjcjcjjcccjcjjcjjjcjjccc")
quarky.playtone("D4", 8)
if quarky.ispadtouched("T3"):
quarky.drawpattern("fffjfffjfjjjjfjfjjfffjfjjjjfjfjjfff")
quarky.playtone("E4", 8)
if quarky.ispadtouched("T4"):
quarky.drawpattern("dddjdjdjdjjdjdjdjjdddjdjjjjdjdjjjjd")
quarky.playtone("F4", 8)
if quarky.ispadtouched("T5"):
quarky.drawpattern("gggjgggjgjjgjjjgjjgggjgjjjjgjgjjggg")
quarky.playtone("G4", 8)
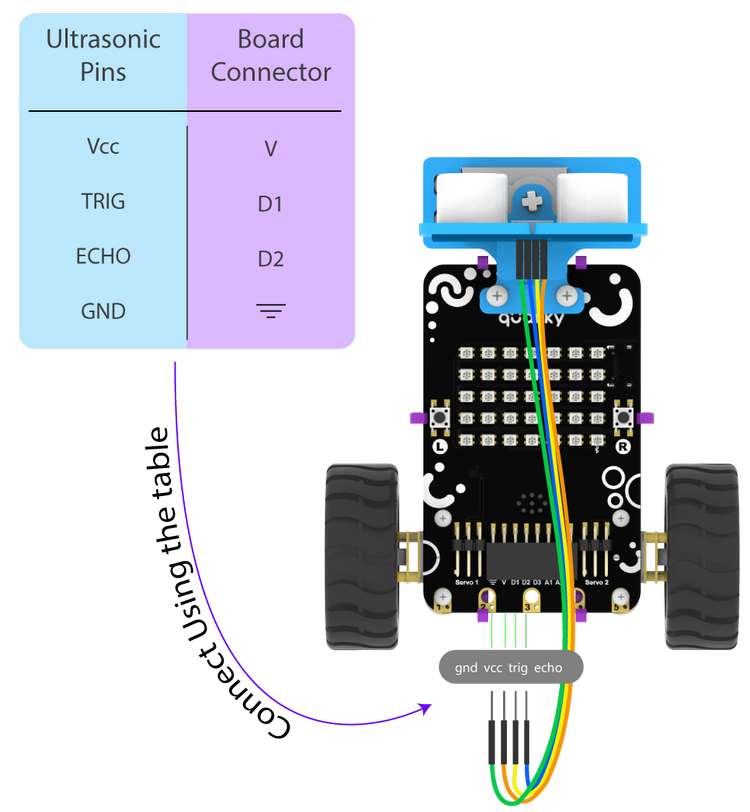
Now we will connect the Ultrasonic Sensor to the Robot. The sensor and the robot have the following pins:
We will start with connecting the ultrasonic sensor with Quarky using the 4 set wire provided in the kit. But, first, make the connection in the following way:
sprite = Sprite('Tobi')
quarky = Quarky()
quarky.setultrasonicpins(1, 18, 19)
while True:
sprite.say(quarky.getdistance(1))
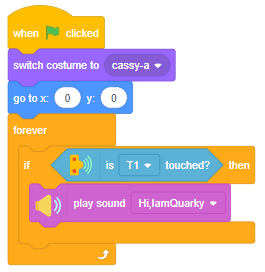
sprite = Sprite('Cassy Dance')
quarky = Quarky()
import time
sprite.switchcostume('cassy-a')
sprite.gotoxy(0, 0)
while True:
if quarky.ispadtouched("T1"):
quarky.playsound("QuarkyIntro")
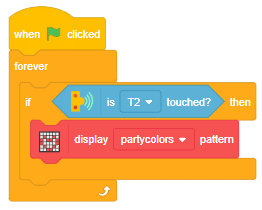
if quarky.ispadtouched("T2"):
quarky.showpattern("party colors")
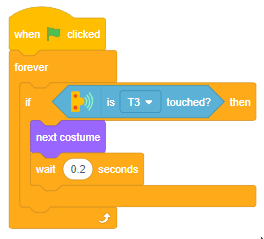
if quarky.ispadtouched("T3"):
time.sleep(0.2)
sprite.nextcostume()
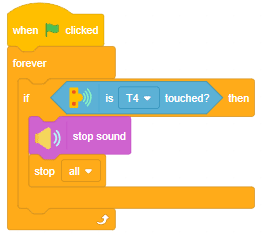
if quarky.ispadtouched("T4"):
quarky.stopaudio()
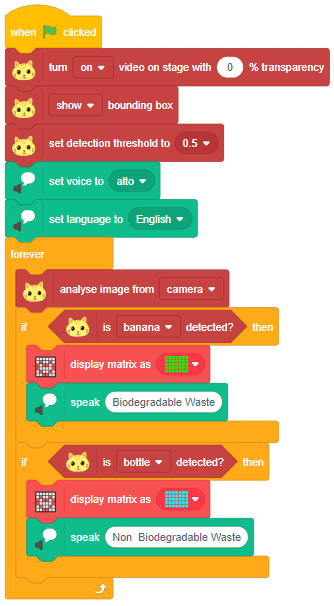
sprite = Sprite('Tobi')
od = ObjectDetection()
speech = TexttoSpeech()
quarky = Quarky()
od.video("on", 1)
od.enablebox()
od.setthreshold(0.5)
speech.setvoice('alto')
speech.setlanguage('en')
while True:
od.analysecamera()
if od.isdetected('banana'):
quarky.drawpattern("ccccccccccccccccccccccccccccccccccc")
speech.speak("Biodegradable Waste")
if od.isdetected('bottle'):
quarky.drawpattern("fffffffffffffffffffffffffffffffffff")
speech.speak("Non Biodegradable Waste")
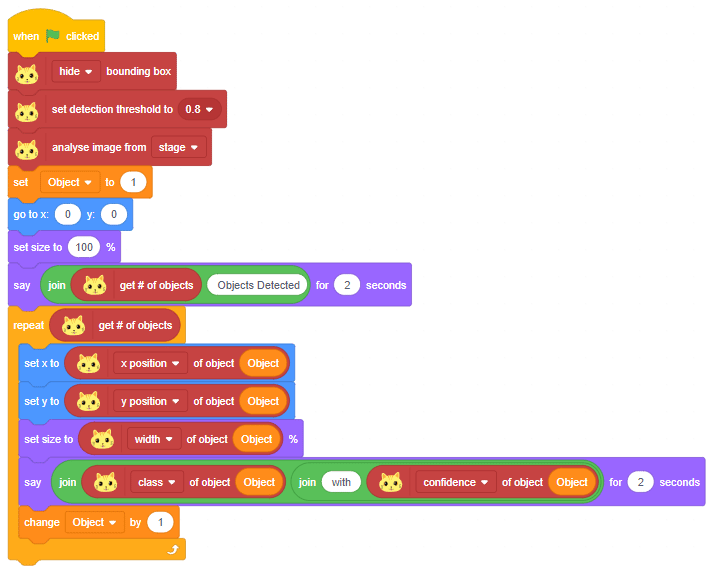
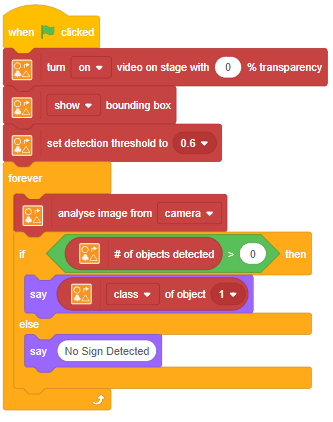
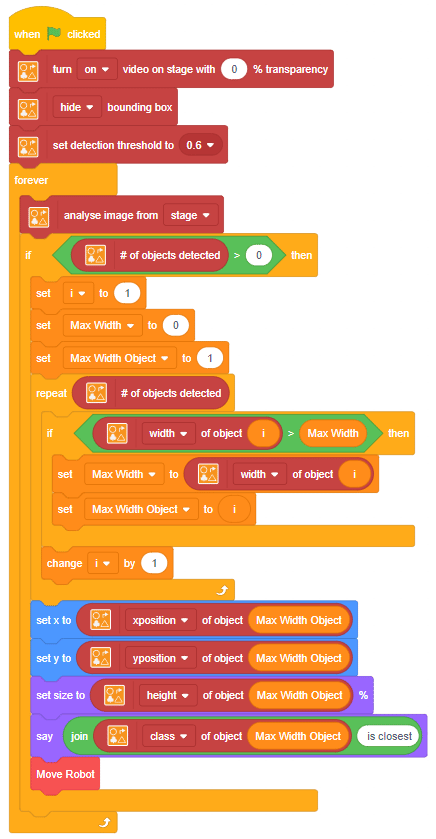
sprite = Sprite('Square Box')
obj = ObjectDetection()
obj.disablebox()
obj.setthreshold(0.5)
obj.analysestage()
sprite.gotoxy(0, 0)
sprite.setsize(100)
sprite.say(str(obj.count()) + " Object Detected", 2)
for object in range(1, obj.count() + 1):
sprite.setx(obj.x(object))
sprite.sety(obj.y(object))
sprite.setsize(obj.width(object))
sprite.say(obj.classname(object) + " with " + str(obj.confidence(object)), 2)sprite = Sprite('Tobi')
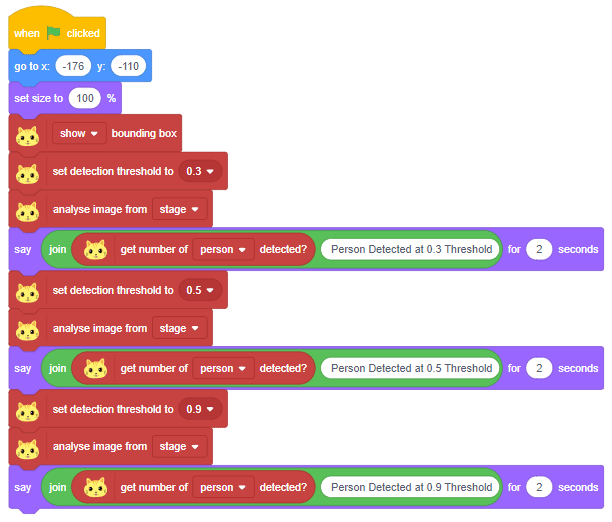
obj = ObjectDetection()
obj.enablebox()
sprite.gotoxy(-180, -110)
sprite.setsize(100)
obj.setthreshold(0.3)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.3 Threshold", 2)
obj.setthreshold(0.5)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.5 Threshold", 2)
obj.setthreshold(0.9)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.9 Threshold", 2)
![]()
![]()
![]()
![]()
![]()
thumb = Sprite('Thumb')
index = Sprite('Index')
middle = Sprite('Middle')
ring = Sprite('Ring')
pinky = Sprite('Pinky')
hand = Posenet()
hand.video("on", 0)
hand.enablebox()
thumb.switchcostume("ball-a")
thumb.setsize(50)
index.switchcostume("ball-b")
index.setsize(50)
middle.switchcostume("ball-c")
middle.setsize(50)
ring.switchcostume("ball-d")
ring.setsize(50)
pinky.switchcostume("ball-e")
pinky.setsize(50)
while True:
hand.analysehand()
if hand.ishanddetected():
thumb.setx(hand.gethandposition(1, 4))
thumb.sety(hand.gethandposition(2, 4))
thumb.show()
index.setx(hand.gethandposition(1, 8))
index.sety(hand.gethandposition(2, 8))
index.show()
middle.setx(hand.gethandposition(1, 12))
middle.sety(hand.gethandposition(2, 12))
middle.show()
ring.setx(hand.gethandposition(1, 16))
ring.sety(hand.gethandposition(2, 16))
ring.show()
pinky.setx(hand.gethandposition(1, 20))
pinky.sety(hand.gethandposition(2, 20))
pinky.show()
else:
thumb.hide()
index.hide()
middle.hide()
ring.hide()
pinky.hide()
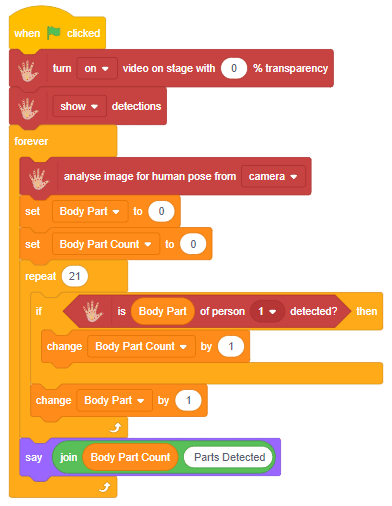
sprite = Sprite('Tobi')
pose = Posenet()
pose.video("on", 0)
pose.enablebox()
while True:
pose.analysecamera()
bodyPartCount = 0
for i in range(21):
if pose.isdetected(i, 1):
bodyPartCount += 1
sprite.say(str(bodyPartCount) + " Parts Detected")
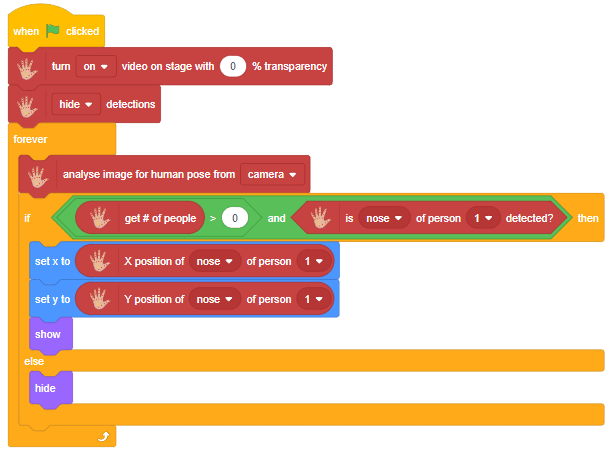
sprite = Sprite('Ball')
pose = Posenet()
pose.video("on", 0)
pose.enablebox()
while True:
pose.analysestage()
if (pose.isdetected(0, 1)):
sprite.setx(pose.x(0, 1))
sprite.sety(pose.y(0, 1))
sprite.show()
else:
sprite.hide()
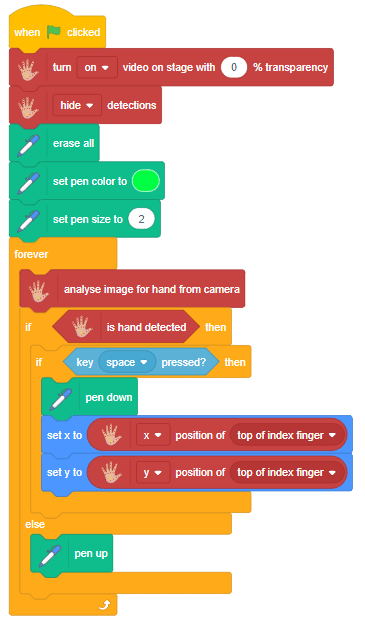
sprite = Sprite('Pencil')
hand = Posenet()
pen = Pen()
hand.video("on", 0)
hand.disablebox()
pen.clear()
pen.setcolor([0, 255, 0])
pen.setsize(2)
while True:
hand.analysehand()
if hand.ishanddetected():
if sprite.iskeypressed("space"):
pen.down()
sprite.setx(hand.gethandposition(1, 8))
sprite.sety(hand.gethandposition(2, 8))
else:
pen.up()


![]()
![]()
![]()
![]()
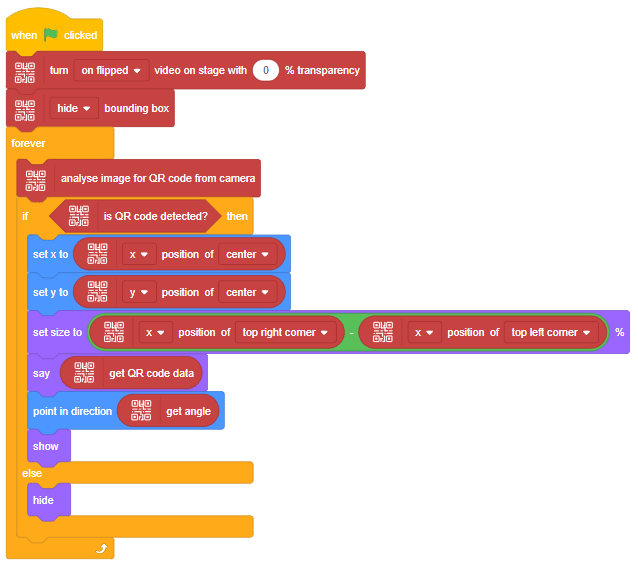
sprite = Sprite('Square Box')
qr = QRCodeScanner()
qr.video("on flipped", 0)
qr.disablebox()
while True:
qr.analysecamera()
if qr.isdetected():
sprite.setx(qr.xpos("center"))
sprite.sety(qr.ypos("center"))
sprite.setdirection(qr.angle())
sprite.say(qr.codedata())
sprite.show()
else:
sprite.hide()
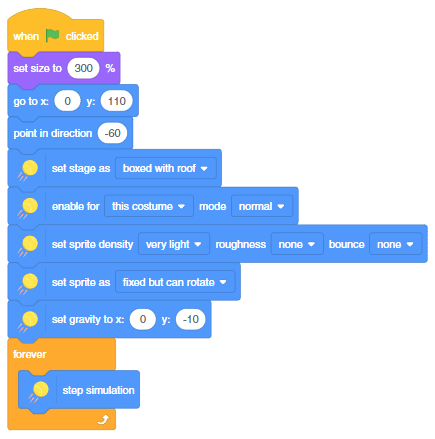
The example demonstrates how to make a sprite be fixed to a point but can rotate. The wand is hanging like a pendulum.
The center of the wand in the costume is the point of rotation.

The following code creates the simulation of the pendulum.
![]()

In this example, you understand the effect of the density, roughness, and bounce properties of the sprites. The ball falls from the top randomly, and the bell is fixed but can rotate.
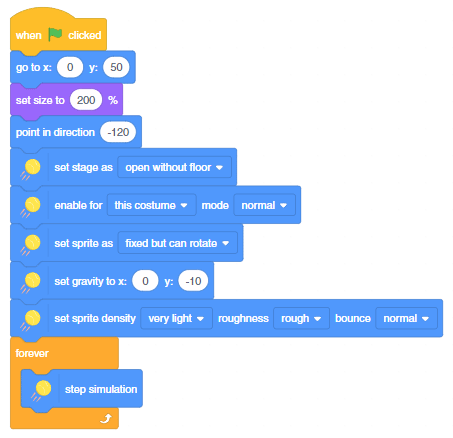
The bell center is changed to make it swing from the top.

This script creates clones of the ball every 0.5 seconds.

This script assigns the properties of the clone.
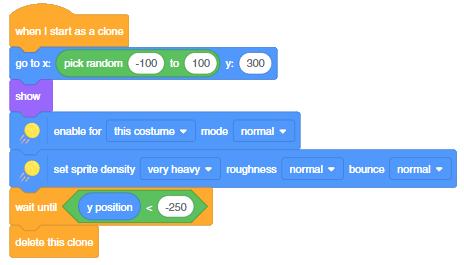
We will change the density of the bell and the ball in the block – set sprite density () roughness () bounce (). This will result in different simulations.



Copyright 2025 – Agilo Research Pvt. Ltd. All rights reserved – Terms & Condition | Privacy Policy