Set gripper open angle to () & close angle to () block is a stack block available in Robotic Arm extension for evive and other Arduino boards. This block is used to set the angles at which the gripper of the robotic arm opens and closes. You need to use this block every time, you open or close the gripper as this block defines at which angles the gripper claw is opened and at which it is closed.
Input Parameters
- Opening angle of the gripper.
- Closing angle of the gripper.

Note: This block is available in both Stage and Upload mode.
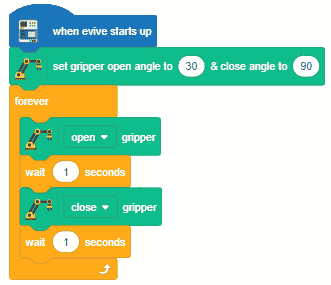
Example
Here, in the given script, make the gripper open and close repeatedly after each second.
- Set the gripper open angle and close angle
- Send command to open the gripper wait for a second and close the gripper.
Note: Before working with the Robotic Arm, we need to calibrate the robotic arm. To calibrate the robotic arm, click here.