Calibrate left leg () right leg () left foot () right foot () is a stack block available in Humanoid Robot extension for evive and other Arduino boards. This block should be included every time you work with the humanoid robot for the first time as it calibrates the angles of all the four servo motors of the arm(2 servos of shoulder + 2 servos of hands) and saves it in the memory of evive.

Input Parameters
- Enter the error angle of the left shoulder servo.
- Enter the error angle of the right shoulder servo.
- Enter the error angle of the left-hand servo.
- Enter the error angle of the right-hand servo.

Example
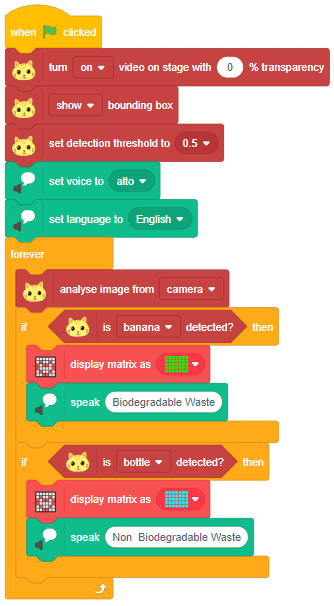
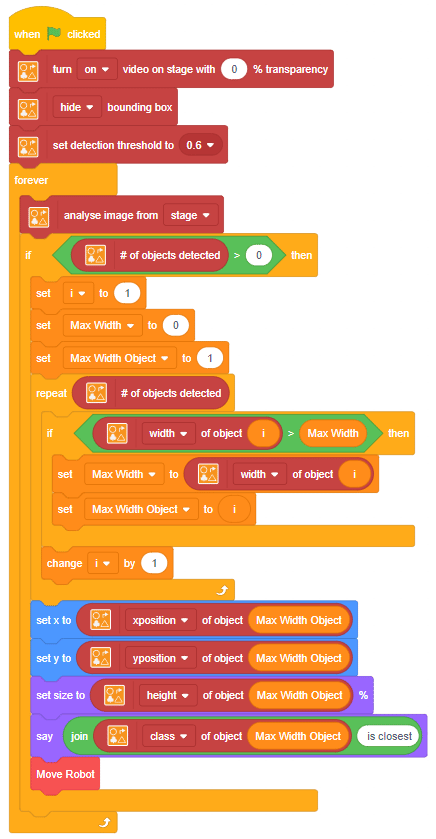
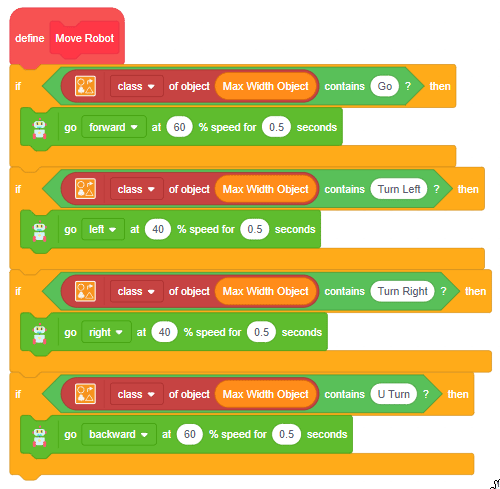
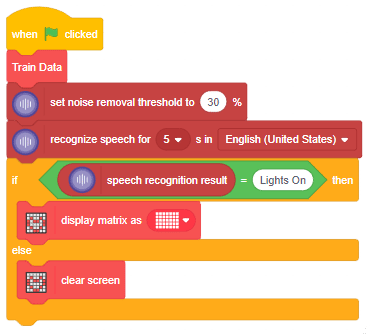
Here, in the given script, we’ll be calibrating both the arms of the humanoid robot i.e. two servos of shoulders and two hands of feet before working it. Write the script given below to calibrate it. Run the script by clicking on the green flag. If the humanoid robot is straight, keep the angles as 0° in the calibrate angles blocks. If it is not straight, then change their respective values and run the script. Use the trial and error method to calibrate the servos.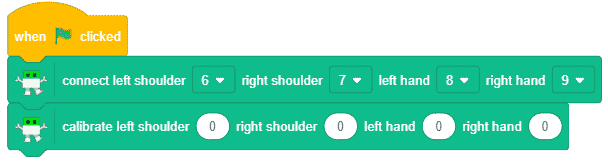
Run the script every time you calibrate a part.