")

Recognition Cards is a special pre-trained machine learning model created to identify the following recognition cards (Download – Recognition Card – A4 Signs Pictoblox):





Following is the process to add Recognition Card capability to the PictoBlox Project.

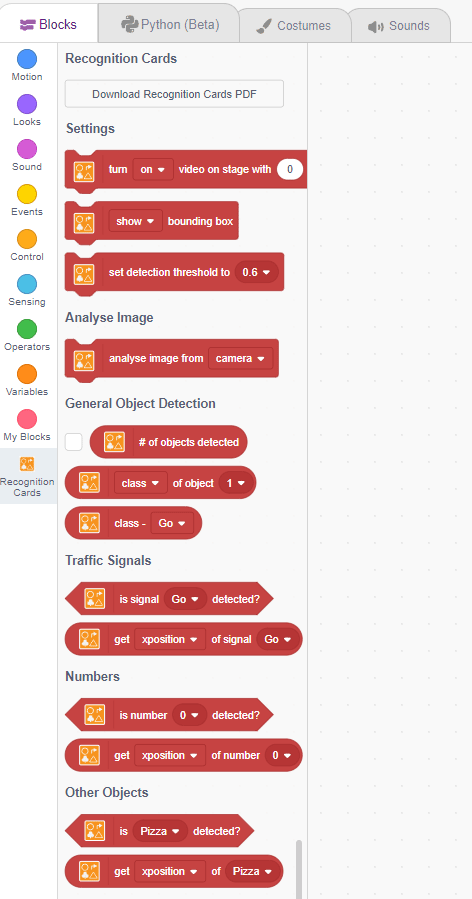
Following is the process to add Recognition Card capability to the PictoBlox Project.
cards = RecognitionCards()