Available in: Block Coding, Python Coding
Mode: Stage Mode
WiFi Required: No
Compatible Hardware in Block Coding: evive, Quarky, Arduino Uno, Arduino Mega, Arduino Nano, ESP32, T-Watch, Boffin, micro:bit, TECbits, LEGO EV3, LEGO Boost, LEGO WeDo 2.0, Go DFA, None
Compatible Hardware in Python: Quarky, None
Object Declaration in Python: qr = QRCodeScanner()
Extension Catergory: Other
Available in: Block Coding, Python Coding
Mode: Stage Mode
WiFi Required: No
Compatible Hardware in Block Coding: evive, Quarky, Arduino Uno, Arduino Mega, Arduino Nano, ESP32, T-Watch, Boffin, micro:bit, TECbits, LEGO EV3, LEGO Boost, LEGO WeDo 2.0, Go DFA, None
Compatible Hardware in Python: Quarky, None
Object Declaration in Python: qr = QRCodeScanner()
Extension Catergory: Other
QR Code is a machine-scannable image that can be instantly read, using a smartphone camera. Every QR code consists of a number of black squares and dots that represent some encoded piece of information; like alphabets, numbers, etc. When your Smartphone scans this code, it translates that encoded information that only computers can understand, into something that can be easily understood by humans.
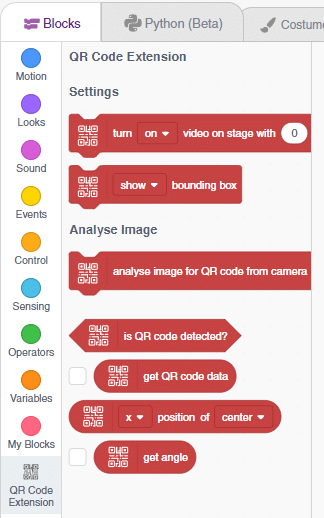
The QR Code Scanner extension allows users to scan QR codes from the camera or stage and report the information:
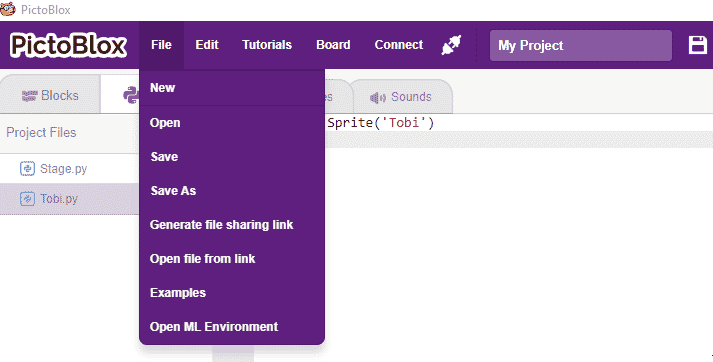
Following is the process to add QR Code Scanner capability to the PictoBlox Project.

Following is the process to add QR Code Scanner capability to the PictoBlox Project.
qr = QRCodeScanner()In this project, a QR code is generated with the help of a QR code generator website. credits – https://www.qr-code-generator.com/
The QR code is linked to a URL. Then, the QR code is scanned with the help of the QR code scanner extension of Pictoblox. The project is created by RS Junction.






















Copyright 2025 – Agilo Research Pvt. Ltd. All rights reserved – Terms & Condition | Privacy Policy