")
 Available in: Block Coding, Python Coding
Mode: Stage Mode
WiFi Required: No
Compatible Hardware in Block Coding: Quarky
Compatible Hardware in Python: Quarky
Object Declaration in Python: quarky = Quarky()
Extension Catergory: Quarky
Available in: Block Coding, Python Coding
Mode: Stage Mode
WiFi Required: No
Compatible Hardware in Block Coding: Quarky
Compatible Hardware in Python: Quarky
Object Declaration in Python: quarky = Quarky()
Extension Catergory: Quarky
The extension allows the user to control the RGB LED display of Quarky.
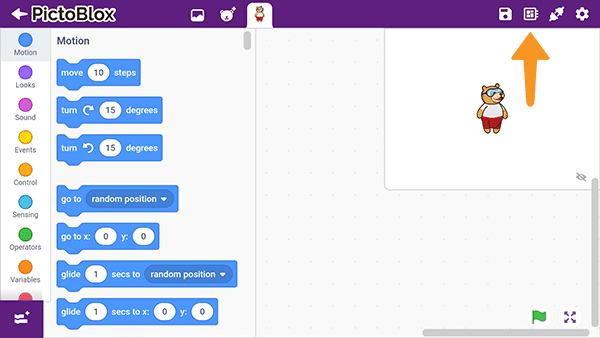
Let’s begin by first connecting Quarky to PictoBlox. Select your preferred type of device i.e. either the desktop/laptop or your smartphone and follow the instructions.
Follow the steps below for connecting Quarky to PictoBlox:
And voila! Quarky is now connected to PictoBlox.
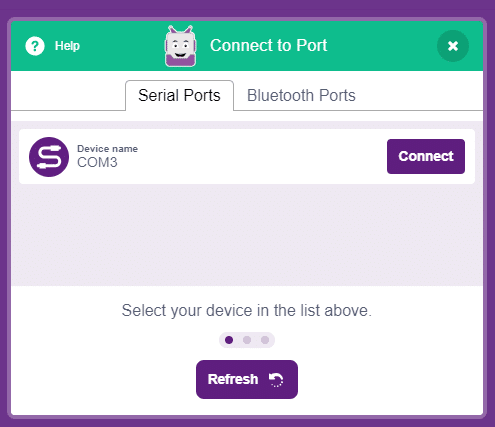
Follow the steps below for connecting Quarky to PictoBlox:
 Select board as Quarky.
Select board as Quarky.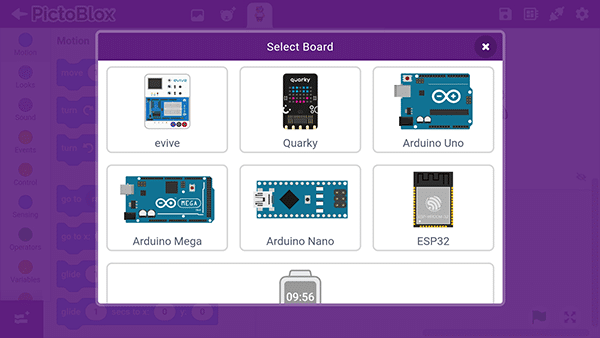
 Select your device from the list.
Select your device from the list.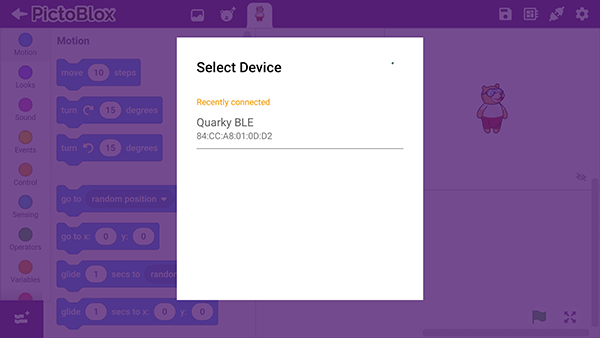
And voila! Quarky is now connected to PictoBlox.
Stage mode is one of the two modes you can write your programs in Pictoblox. In this mode, you can write scripts for the sprite and boards to interact with sprites in real-time. If you disconnect the board with Pictoblox, you cannot interact with the board anymore. In this mode, you can make games and animation interacting with Quarky.
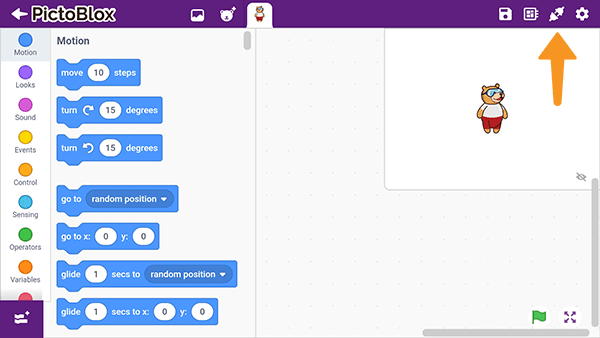
You can toggle between the upload mode and stage mode using the button on the top right side of Pictoblox.

In Python Coding Environment, use the following object declaration to use Python functions in Stage Mode:
quarky = Quarky()Upload mode is one of the two modes you can write your programs in Pictoblox. This mode allows you to write scripts and upload them to the board so that you can use them even when it is not connected to your computer, for example, you need to upload a script for making moving robots.
In this case, Quarky will run offline according to the program and it can not interact with the stage.
In Python Coding Environment, use the following object declaration to use Python functions in Upload Mode:
from quarky import *














Copyright 2025 – Agilo Research Pvt. Ltd. All rights reserved – Terms & Condition | Privacy Policy