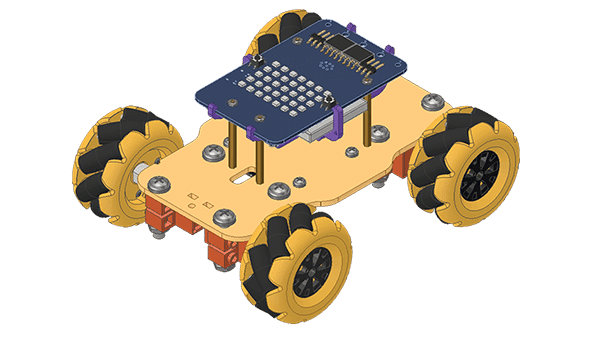
The Quarky Mecanum Wheel Robot is a type of robot that uses a special type of wheel to move. The wheel is made of four rollers mounted at 45-degree angles to the wheel‘s hub. Each roller has its own motor and can spin in either direction. This allows the wheel to move in any direction, making it an ideal choice for navigating around obstacles and tight spaces. The mecanum wheel robot can also turn on the spot, allowing it to make sharp turns without having to reverse direction.
The robot is programmable with PictoBlox. PictoBlox is coding education software that uses both graphical block-based coding and Python programming.
With PictoBlox, you can program the Mecanum Robot to move, grip, and perform pick & place actions!
If you haven’t installed PictoBlox, please follow the instructions:
STEP 2: Run the .exe file.
Some of the device gives the warning popup. You don’t have to worry, this software is harmless. Click on More info and then click on Run anyway.
STEP 3: Rest of the installation is straight forward, you can follow the popup and check on the option appropriate for your need.

Your software is now installed!
Connecting Quarky with PictoBlox
Let’s begin by first connecting Quarky to PictoBlox. Select your preferred type of device i.e. either the desktop/laptop or your smartphone and follow the instructions.
Desktop
Follow the steps below for connecting Quarky to PictoBlox:
- First, connect Quarky to your laptop using a USB cable.
- Next, open PictoBlox on your desktop.
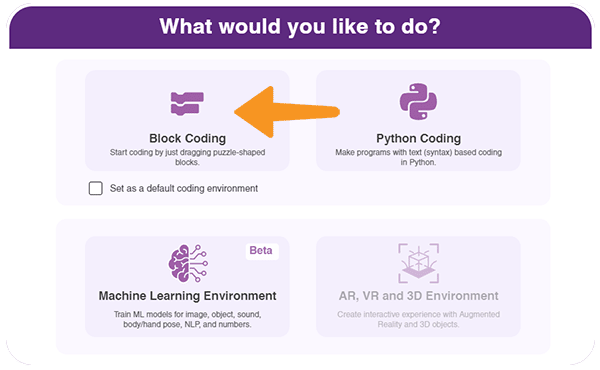
- After that, select Block as your coding environment.
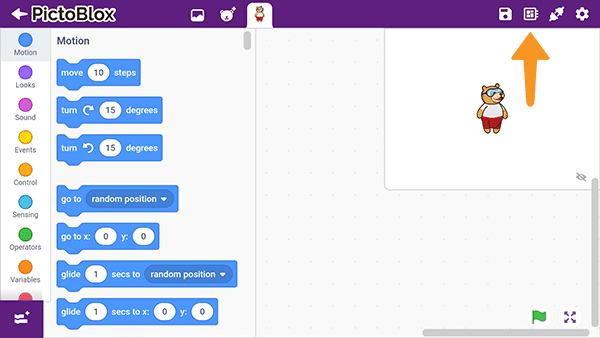
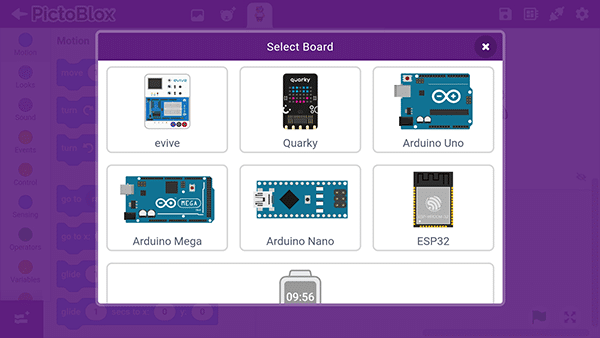
- Then, click the Board button in the toolbar and select board as Quarky.
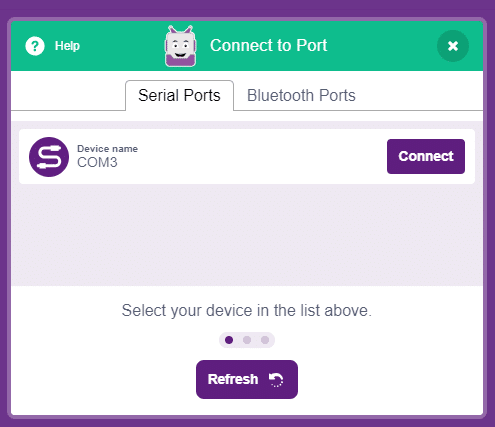
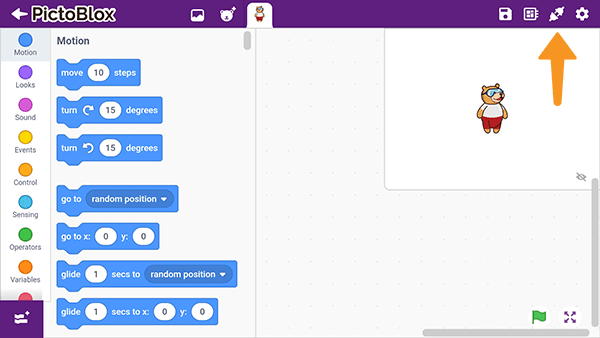
- Next, select the appropriate Serial port if the Quarky is connected via USB or the Bluetooth Port if you want to connect Quarky via Bluetooth and press Connect.
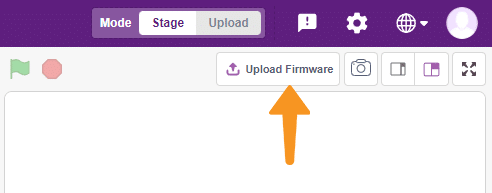
- Click on the Upload Firmware button. This will upload the latest firmware in Quarky.
 Note: If your device already has the latest firmware, then PictoBlox will show the message – Firmware is already updated. For learning more you can refer to this tutorial: https://ai.thestempedia.com/docs/quarky/quarky-toubleshooting/updating-quarky-firmaware-with-pictoblox/
Note: If your device already has the latest firmware, then PictoBlox will show the message – Firmware is already updated. For learning more you can refer to this tutorial: https://ai.thestempedia.com/docs/quarky/quarky-toubleshooting/updating-quarky-firmaware-with-pictoblox/ - Once the firmware is uploaded, Quarky starts the Getting Started program. This runs only for the first time. Run through it.
And voila! Quarky is now connected to PictoBlox.
Mobile
Follow the steps below for connecting Quarky to PictoBlox:
- First, power ON Quarky.
- Open PictoBlox on your smartphone. Go to My Space and make a new project by clicking the ‘+(plus)’ button in the bottom-right corner.
- Then, tap the Board button in the top-right corner of the toolbar.
 Select board as Quarky.
Select board as Quarky.
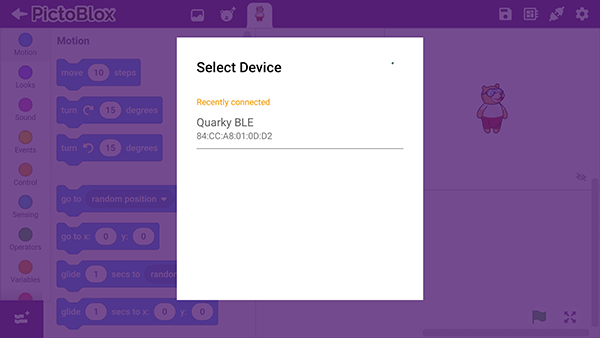
- Next, tap the Connect button:
 Select your device from the list.
Select your device from the list.
And voila! Quarky is now connected to PictoBlox.
Quarky Mecanum Extension
The Quarky Mecanum extension in PictoBlox allows you to control the robot. It has blocks for specific applications. To add the Quarky Mecanum extension follow the instructions:
- Click on the Add Extension button and add the Quarky Mecanum extension.

- You can find the Quarky Mecanum blocks available in the project.
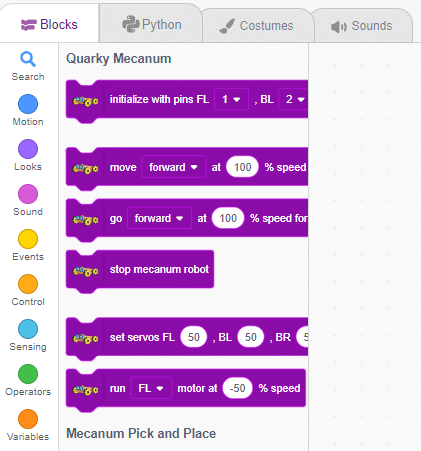
PictoBlox Blocks for Quarky Mecanum
The following blocks are available for the Quarky Mecanum:
Warning: Undefined array key "pp_wrapper_link" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/wrapper-link.php on line 194
Warning: Undefined array key "pp_wrapper_link_enable" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/wrapper-link.php on line 196
Warning: Undefined array key "pp_custom_cursor_icon" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/custom-cursor.php on line 350
Warning: Undefined array key "pp_custom_cursor_text" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/custom-cursor.php on line 351
Warning: Undefined array key "pp_custom_cursor_target" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/custom-cursor.php on line 352
Warning: Undefined array key "pp_custom_cursor_css_selector" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/custom-cursor.php on line 353
Warning: Undefined array key "pp_custom_cursor_enable" in /var/www/html/wp-content/plugins/powerpack-elements/extensions/custom-cursor.php on line 355












Conclusion
In conclusion, the Quarky Mecanum Wheel Robot is a powerful and versatile robot that can be programmed using PictoBlox. With its Mecanum extension, it can be programmed to move in any direction, grip objects, and perform pick & place actions. With the help of PictoBlox, users can easily program the robot to perform their desired tasks.


