



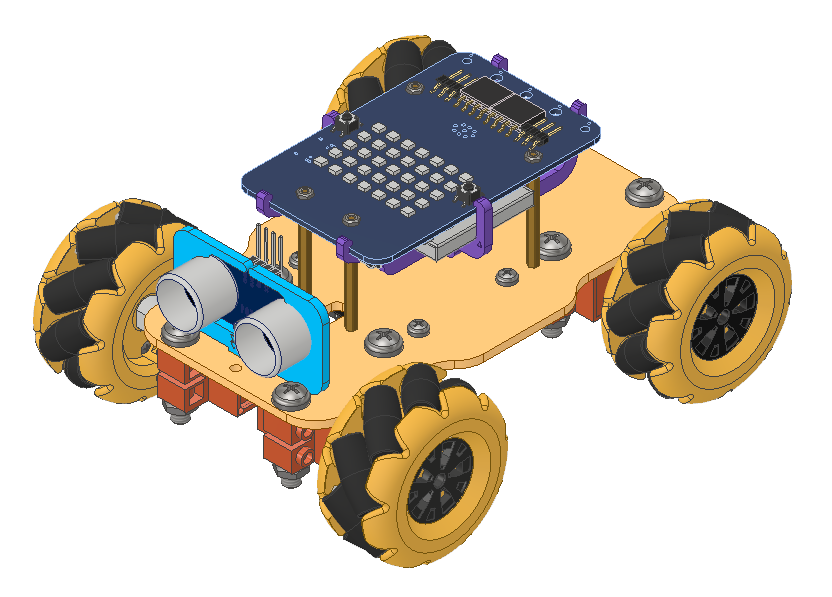
The Quarky Mecanum Wheel Robot is a type of robot that uses a special type of wheel to move. The wheel is made of four rollers mounted at 45-degree angles to the wheel‘s hub. Each roller has its own motor and can spin in either direction. This allows the wheel to move in any direction, making it an ideal choice for navigating around obstacles and tight spaces. The mecanum wheel robot can also turn on the spot, allowing it to make sharp turns without having to reverse direction. With 10+ different activities, this kit will guide you through the basics of Mecanum Wheel robotics.
Refer to the tutorials to learn about the Quaky Mecanum Wheel Robot, and how to assemble and program it in block coding or Python coding.



Refer to the tutorials to learn how to use PictoBlox Block Coding Environment to code Quarky Mecanum Wheel Robot for different applications.




Refer to the tutorials to learn how to use PictoBlox Python Coding Environment to code Quarky Mecanum Wheel Robot for different applications.

Refer to the documentation of PictoBlox Extension to understand how to use the blocks and functions for the Quarky Mecanum Wheel Robot.

Copyright 2025 – Agilo Research Pvt. Ltd. All rights reserved – Terms & Condition | Privacy Policy